触覚センサーとは
1.触覚センサーとは何か
触覚センサーとは対象物を把持するセンサーのことです。近年、工場をはじめ施設、家庭などでもロボットの活用が進められていますが、このような用途では、多種多様な対象物を把持することが求められます。そのために必要なのが触覚センサーとなります。
触覚センサーを搭載することにより、大小、また形の異なる様々な対象物をつかむ、運ぶなど器用な作業を行えるようになります。
2.触覚センサーに求められる特性
触覚センサーに求められる要件としては、下記のようなものが挙げられます。
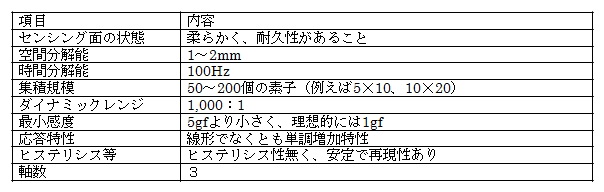
近年ロボットの進展は目覚ましく、ヒューマノイドロボットも同様です。ヒトの手を模したハンドの精緻さも向上しています。しかし、ヒトと同じ手作業を遂行するには至っていません。
その理由の一つに、従来の触覚センサーは圧力のみの検出だけが可能であり、せん断方向の力を検出できないことがあると考えられます。そのため軸数が3であることが重要になると考えられます。
3.三軸用触覚センサー
物体の表面の摩擦係数などから材質を推定したり、滑り落としやすいものを滑り落とさずにつかんだりするためには、三軸の力の計測が重要となります。
今後ロボットが家庭や医療現場に数多く採用されるとなると、三軸力検出能力の重要性が高まると思われます。例えば、家庭の場面では、皿洗いとか配膳の場面でせん断力の獲得が重要となります。また介護の場面で寝ている人の背中に手を差し入れて抱き上げるとき、指先のせん断力を頼りに手を差し入れる必要が生じてきます。
▽続きはこちら
書籍『ロボット用触覚センサの設計法』