SLAMとは(自律走行ロボット)
1.走行ロボットの分類
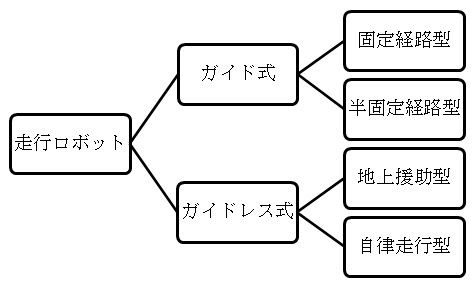
走行ロボットは、ガイド式とガイドレス式に大別されます。ガイド式はロボットが走行する誘導路の床面あるいは床内に誘導体を設置することにより、ロボットを誘導し走行するものです。
誘導体を連続して設置する固定経路型と、断続的に設置する半固定経路型に分類することができます。
ガイドレス式は誘導体を誘導路に設置せずに、自己位置、あるいは走行路を検出し走行するものです。床面の性質や走行環境による床への影響などを考慮する必要がないという特徴があります。ガイドレス式は地上援助型と自律走行型に分類することができます。
2.自律走行ロボットの概要
自律走行型は、走行ロボットが移動する周囲の環境に何らかの誘導装置を設置することなく、ロボット本体に搭載したセンサにより自己位置、あるいは、走行路を検出して走行するものです。
実用化されつつある主な自律走行型には、2次元SLAM方式、画像処理と3Dモデル比較方式、3次元SLAM方式がありますが、いずれもSLAM(Simultaneous Localization and Mapping)という技術が基本になっています。
SLAMとは環境を計測するセンサを用いて、地図を生成(Mapping)しながら、同時に位置を同定するもので、その頭文字をとって「スラム」技術と呼んでいます。
2-1.2次元SLAM方式とは
<原理>
レーザスキャナで計算した複数の距離データを用いて地図を作成し、この地図と距離データを照合し、位置を同定します。
<検出安定性>
移動体接近時も検出(大勢に取囲まれると、検出失敗)
<適用範囲>
- 生産現場への適用は比較的安価
- 固定物がないと、検出できない
- 坂道は要注意
2-2.画像処理と3Dモデル比較方式
<原理>
3次元モデルデータから得られる2次元情報とカメラ画像を比較して、搬送ルートを導出し、自律走行します。
<検出安定性>
CADデータと異なる状態での検出性能が課題
<適用範囲>
無人化ニーズが高い用途(危険物管理区域、冷凍倉庫など)への適用を想定
2-3.3次元SLAM方式とは
<原理>
ステレオカメラにより撮影した映像から環境の3次元地図の生成とカメラの位置姿勢を推定します。
<検出安定性>
テレビ中継における画像処理など、一部の分野では実用化され始めています。画像における特徴点、線情報、画像情報などを利用することにより、リアルタイム性の確保、位置検出の高精度化などに対応しています。
▽続きはこちら
書籍『自律走行ロボットの制御技術』