点検・検査ロボットとは
1.点検・検査ロボットの概要

品質管理や設備のメンテナンスにおいて、点検や検査は欠くことのできない作業である。
今日、人手不足や人件費の高騰の観点から、あるいは、検査におけるヒューマンエラー、検査員の個人差による品質のばらつきを防止する意味からも、この分野を機械化・自動化するニーズは高く、その中でロボットが果たす役割は大きい。
最近ではロボット自ら移動し、点検作業ができるAGV/AMRの搭載用に設計されたロボットもあり、その活躍が益々期待されている。
現在、点検・検査ロボット(システム)と実用化されている分野としては『生産時の品質検査』『生産設備・配管などの点検』『建物・橋梁などの点検』等があるが、以降主に生産現場で使用される点検・検査ロボットについて記す。
2. 点検・検査ロボットの原理
一般的には、産業ロボットあるいは協働ロボットに、点検・検査のためのツール
(カメラ・計測器・センサー・ゲージ・専用ツール)などを保持させ、対象物を検査計測するか、ロボットは対象物を搬送するアクチュエータとして機能し、検査治具などにそれを出し入れするために供される場合がある。
カメラ・センサーや計測器の方が、概して軽量なのでこちらをロボットに持たせることが多いが、ロボットの可動域、カメラ・センサーなどのケーブルの引き回し、センサーの使用条件の制限などから、センサー側を固定する場合も少なくない。
いずれにしても、条件の変更にフレキシブルに対応できる点も、検査・点検ロボットの利点である。
3. 点検・検査ロボットの種類・用途
点検・検査ロボットは使用するツールのよって幅広い用途に使用することができる。
主な用途について以下に記す。
3-1. 外観検査ロボット (外観点検ロボット)
ロボットがカメラを持つか、製品を持ってカメラに見せるなどにより、製品を自動検査する。製品を様々な角度から検査することができる。
最近では、AIを使用し広い範囲や大型製品の検査も容易になっている。
3-2. センシングロボット
ロボットに、用途にあったセンサーや計測器を持たせて検査や点検を行う。
例えば、寸法測定のためのデジタルスケールやレーザーセンサーを用いた寸法測定、超音波センサーなどを用いた非破壊検査など、その用途は幅広い。

3-3. 特定用途向け検査ロボット
ある特定の検査に特化した機能を持つロボット。
ネジ検査・穴検査などが代表的な事例で、ロボットの力覚制御が進展したため、従来は困難と言われていた、エアマイクロゲージやピンゲージなどの挿入も可能になってきている。
この様に、点検・検査の作業をロボット化することで、ヒューマンエラーの削減やコストダウン、トレーサビリティ管理のデジタル化などに大きく寄与している。
4. 点検・検査ロボットのメリット・デメリット
ここまでに記したように、点検・検査にロボットを導入するメリットは非常に大きいが、幾つかのデメリットもあるので、以下にそれらをまとめる。
4-1.(メリット)
① 人手に頼っていた点検・検査工程を無人化・省人化することで人手不足の解消や合理化ができる。
② 検査結果のバラツキや、ヒューマンエラーによる見落としなど、人による検査の問題点が解消できる。
③ 検査データは、機械的・電子的に記録されるため、トレーサビリティ管理が容易になる。
④ 点検箇所や現場の雰囲気により、人での作業が困難な環境でも使用できる。
⑤ 一般的に検査時間は早くなり、継続時間も長い(休憩不要)
4-2.(デメリット)
① 導入にはイニシャルコストが必要。
② 点検・検査の作業内容によっては、ロボットの安全対策を厳重にする必要がある。
③ 多品種少量品には不向きな場合が多い(ティーチング作業などが頻繁に必要な場合)
④ ロボットを扱えるオペレーターが必要。
このように、幾つかのデメリットもあるが、それ以上に得られる利益は大きく、今後益々高まるであろう、品質や安全性の向上への要求、人手不足への対応などのためには、点検・検査にロボットの導入を推進することは、必須と言える。
また、デメリットに関しても、例えばイニシャルコストについては、補助金を活用することも可能、多品種少量に対応するには、治具の工夫などにより、共通プログラムで動かしたり、近年ティーチングも簡素化されているものもある。
更にロボット作業のオペレーターの育成は、点検・検査の用途のみならず、生産の無人化・省力化においては、欠くことのできない人材である。
5. ネジ検査ロボットについて
ネジ加工後の検査は、ねじゲージを検査員が挿入し通りゲージの通過と、止りゲージの不通過を確認することが行われている。特に自動車のエンジン部品やブレーキ部品など、安全性が要求される部品では、チェックが厳重ですが、検査箇所も多く非常に手間がかかる作業であり、加えて見落としやチェック漏れ、場所のズレなど、ヒューマンエラーが発生しやすい作業で、労力・検査員へのストレスともに高い作業です。
この作業をロボットで行うことで、省力化・検査の正確性の向上・データ収集のデジタル化などが容易に行うことが出来、大幅な効率化・合理化を実現している。
それらを可能にしている要素について、以下に記す。
① ロボットでのネジ検査専用に開発されたデバイス(NewVista RTUユニット)を使用している。
② ネジへゲージを挿入するための技術的課題は、検査ユニットが担っており、ロボットはネジ位置への教示だけですむ。
③ 作業状の危険性が、ゲージ挿入時のみなので協働ロボットとの親和性が高い。
④ 検査データを外部のPLCなどに出力できるので、検査データをリアルタイムに保存し、トレーサビリティ管理がしやすい。
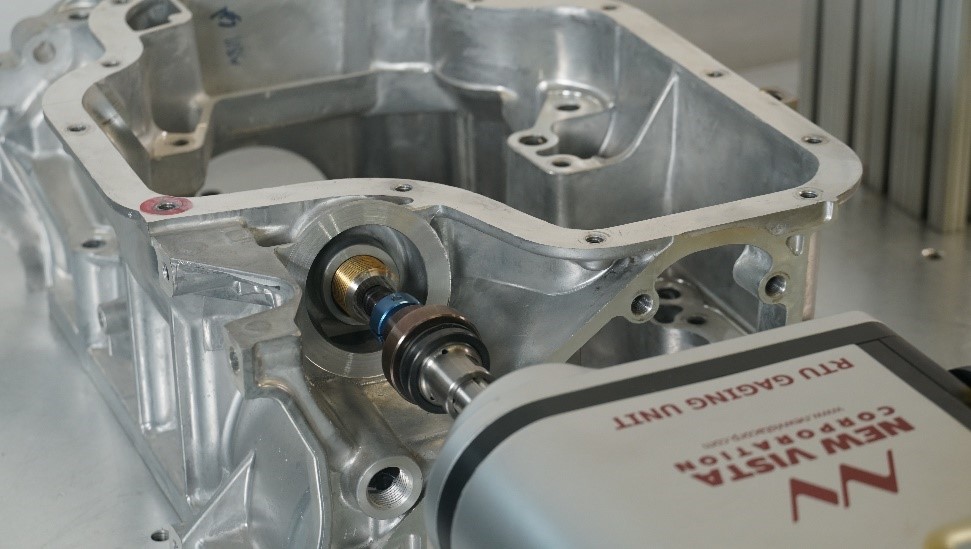
NewVista ロボット用ネジ検査ユニットを使用して検査を自動化。通り・止りの合否判定だけでなく、ネジ深さの実測値もデータ表示し、検査の無人化とデータ収集の工数を大幅に削減します。当社はネジ検査ロボットや外観検査ロボットで、多くの経験と独自ノウハウを有しています。ネジ検査ロボットシステムの導入、お問合せはサンゲン株式会社へ。