天井裏走行ロボットとは
1. 天井裏走行ロボットとは
天井裏とは天井材と上階の床面や屋根との間の空間を言い、多くの場合配管・空調設備・各種ケーブル等が設置されていて、建築物の機能を維持するためにはこれらの点検や補修が不可欠です。また後付けされた設備や構造は図面として管理されていないこともあり、改修を行う時には事前の調査が必要になることもあります。
点検・調査は主に点検口からの目視で行っていますが、視点が限定されているためこれによる情報は限られています。たとえば、交換しようとしている設備の型式が現物を見なければわからない場合でも、銘板が点検口から見えない位置に取り付けられている事もあります。こうした場合は作業員が天井裏へ入り、目視で確認する必要がありますが、天井材と上階床面との距離は狭く、多様な設備が設置されているのに加え天井材の耐荷重は大きくないため、天井裏での人間による作業は困難であることが多いです。天井裏走行ロボットは、この様な狭小空間で人間に変わって移動し調査をするための小型・軽量のロボットです。
天井裏での作業は、前述した点検・調査の他に新たなケーブルを敷設する工事もあります。こうした工事にも天井裏走行ロボットは利用されます。
2. 天井裏走行ロボットの特徴
天井裏へのアクセスは、主に天井に設けられた300mm角から角600mm角の点検口を利用するため寸法の制約があります。また人間が天井裏走行ロボットを持ち上げて天井材の上に設置したり、耐荷重の小さい天井材の上を走行したりするため、重量の面でも制約があります。吊り天井の場合は野縁や野縁受けに天井板が固定されているため、天井裏を移動するためにはこれらを乗り越えることができる能力も求められる一方、天井裏に設置された設備と天井材との隙間を通り抜けるためには、ロボットの高さを低く抑える必要があります。
天井裏走行ロボットの制御は、ロボットに搭載された制御用カメラ映像を、居室等の作業員が見ながら遠隔で行うタイプが多いです。点検・調査には、制御用カメラを兼用することもありますが、点検・調査用の高画素な専用カメラや各種センサーから得られる情報を利用します。
天井裏へのケーブル敷設を行う場合は、ケーブルあるいはケーブルを結んで引っ張るための呼び線を引きずりながら、あるいは繰り出しながら走行する必要があります。こうした用途では、ロボットへの給電をバッテリーで行わず有線で行うこともあります。
3. 天井裏ロボットの種類
3-1. 新日本空調株式会社 天井裏ロボットVoOE(ボーイ)
VoOEは既存の建物等の天井裏に設置されている設備機器類の点検・調査を行うロボットです。同ロボットは、3つのユニットを直列につないで構成されていて、各ユニットの両側に設けられたクローラで走行します。前後のユニットの角度を中央のユニットに対して操作することで、100mmの障害物を乗り越えることができます。
全長547mm幅210mm高さ120mm 質量 6.96kg 連続稼働時間 45分 移動速度6m/分
3-2. 大成建設株式会社 探査ロボットCHERI (チェリー)
CHERIは建築物を維持管理するため、劣化診断や耐震診断などの点検作業を行うロボットです。同ロボットは、左右にクローラを配置した本体の四隅に、クローラとほぼ同一幅の4つのアームを有し、クローラを駆動しつつ同アームを本体取付部を中心として回転させることで、65mmの段差を乗り越えることができます。カメラの撮影位置を最大300mmまで上昇させることができる機構があります。
全長350mm幅250mm高さ90mm 質量4.5kg 連続稼働時間2時間 移動速度7.2m/分
3-3. 株式会社関電工 天井配線ロボット 楽々とおる君
楽々とおる君は、天井裏の配線を行うために開発されたロボットです。人力では長い距離の通線を一度に行うことは出来ず、短い距離の通線を繰り返して長距離の通線を実現していますが、各所での点検口の作業が必要でした。楽々とおる君は、一度に長い距離の通線を実現することができるので、作業効率を向上させることが可能です。本ロボットは、左右独立に制御できるクローラで走行し、天井下地材が作る段差・障害物を乗り越えることができます。本ロボットは有線給電であるため走行可能時間に制限はありません。
全長300mm、幅120mm、高さ120mm 質量3.5kg 連続稼働時間 制限なし 移動速度9m/分
3-4. 株式会社関電工 天井配線ロボット 楽々とおる君NEO
楽々とおる君NEOは楽々とおる君を改良したロボットで、通線作業だけでなく点検・調査も可能としています。駆動方式は、従来のクローラから表面に液体樹脂コーティングを施したスポンジタイヤによる4輪駆動に変更しています。スポンジタイヤを採用することで乗り越え性能が向上したとともに、既存設備への損傷リスクも低減しています。搭載している360°カメラは190mmから370mmまで高さを調節することが可能で、天井裏に設置されている各種設備等の下を潜り抜けるときに効果を発揮します。
全長450mm幅260mm高さ190mm 質量2.7kg 連続稼働時間 制限なし
4. 天井裏ロボットの応用事例
天井裏走行ロボットを利用した各種調査の事例を写真で紹介します。オフィス等の天井裏の他に、工場内の高所調査や人間が入ることができない隙間からロボットを挿入して調査した事例です。


5. 天井裏走行ロボットの今後
天井裏に設置されている設備や配管・配線等の点検や調査・配線作業は、高所で狭い空間での作業であるため危険を伴い、また暗くほこりも多い環境であるため作業員への負荷が高い作業で、こうした作業に携わる労働力の不足は深刻です。
一方、コスト削減や環境問題への配慮のため、適切に点検・補修を施して建物の長寿命化を図る方向にあり、それに伴って設備等の点検・調査の必要性も高まっていくであろうと考えられます。
天井裏走行ロボットの導入は、こうした作業の省力化や安全性の向上に寄与するとともに、作業を効率化するにより、増加していく点検・調査件数にも対応することが可能となります。
点検・調査時の映像はメモリー等に保存することができるため、あとから見直すことが可能です。人間と比べてロボットは小型であるため、死角の少ない360°カメラ映像を容易に撮影することができます。
一方で、何らかの障害があって走行ができなくなると、ロボットの回収が必要です。こうした事態を避けるためにはロボット本体やバッテリーの管理・メンテナンスが重要です。また主にカメラから得られる映像を頼りにした遠隔での操縦であるため、操作に習熟しておく必要があります。
6. おすすめ天井裏走行ロボット 紹介
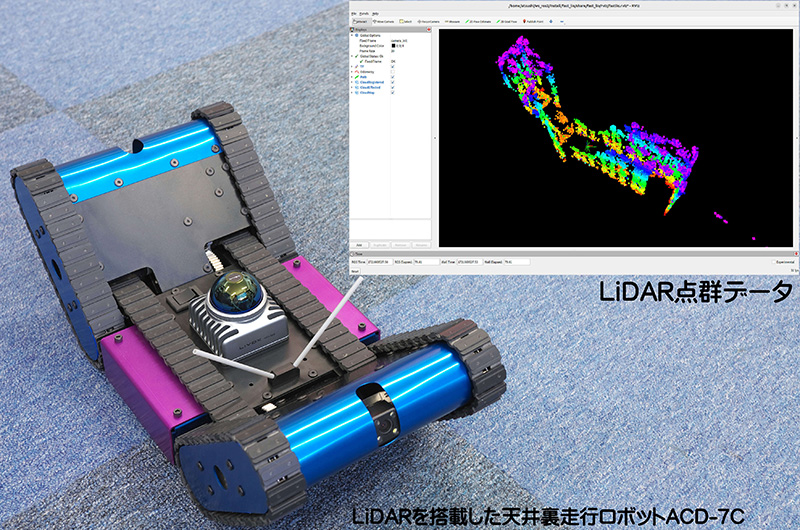
ACD-7Cは主に天井裏での調査・点検を行うためのセンサ・カメラ等を搭載するプラットホームとして開発された装置です。左右にクローラを有する3つのユニットを直列につないだ構成で、前後ユニットの角度を制御することで100mmの段差乗り越えが可能です。走行に用いるカメラは前後左右に各1個配置され、無線LANで遠隔から見ることができます。操縦と映像確認とは異なる無線LANを用いており、安全性に優れています。全長515mm幅205mm高さ70mm質量6.6kgで、用途に応じて360°カメラやLiDAR等搭載機器を搭載することが可能です。本体のみの場合、速度5.4m/分で12時間(走行距離4000m)走行可能な容量のバッテリーを搭載しているため、各種搭載機器へ電源を供給することができます。